
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по зарубежной литературе
Рефераты по логике
Рефераты по логистике
Рефераты по маркетингу
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по схемотехнике
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Проектирование планетарного редуктора Д-27
Курсовая работа: Проектирование планетарного редуктора Д-27
Введение
1. Подбор чисел зубьев
2. Расчет на прочность зубчатых передач
2.1 Проектировочный расчет I-ой ступени
2.1.1 Определение передаточного отношения
2.1.2 Определение крутящего момента на шестерне при трех режимах нагружения
2.1.3 Определение эквивалентных чисел циклов перемены напряжений
2.1.4 Определение допускаемых контактных напряжений
2.1.5 Определение начального (делительного) диаметра шестерни
2.1.6 Геометрический расчет зубчатой передачи
2.2 Проверочный расчет I-ой ступени
2.2.1 Проверка передачи на контактную выносливость
2.2.2 Проверка передачи на изгибную прочность
2.3 Проектировочный расчет II-ой ступени
2.3.1 Определение передаточного отношения
2.3.2 Определение крутящего момента на шестерне при трех режимах нагружения
2.3.3 Определение эквивалентных чисел циклов перемены напряжений
2.3.4 Определение допускаемых контактных напряжений
2.4 Проверочный расчет II-ой ступени
2.4.1 Проверка передачи на контактную выносливость
2.4.2 Проверка передачи на изгибную прочность
3. Силовой анализ рассматриваемого механизма
3.1 Расчет сил
3.2 Определение моментов на валах крутящий момент действующий на вал заднего винта
4. Проектирование валов и осей
4.1 Проектирование валов
4.2 Проверочный расчет заднего вала винтовентилятора
4.3 Проектирование оси сателлита
5. Проектирование подшипников
5.1 Расчет роликоподшипника сателлита
5.2 Проверочный расчет шарикового радиально-упорного подшипника
5.3 Проверочный расчет роликового подшипника
6. Проверочные расчеты
6.1 Расчет болтового соединения
6.2 Проверочный расчет шлицевых соединений на прочность
7. Техническое описание редуктора
7.1 Описание редуктора
7.2 Принцип работы редуктора
На малых и средних скоростях полета (до 750-800 км/ч) турбореактивные двигатели вытесняются винтовентиляторнымим. Это объясняется тем, что для указанного диапазона ТРД значительно уступает ТВВД и по экономичности, и по взлетно-посадочным характеристикам.
ТВВД состоит из тех же основных элементов, что и ТРД, но, помимо того, снабжен воздушным винтовентилятором, вал которого соединен с валом свободной турбины через редуктор.
Необходимость применения редуктора вызвана тем, что оптимальная частота вращения свободной турбины ТВВД значительно больше оптимальной частоты вращения воздушного винта. Это объясняется тем, что в ТВВД расширение газа в турбине происходит до давления, близкого к атмосферному, поэтому суммарная мощность турбины превышает потребную для привода компрессора газогенератора. Избыточная мощность свободной турбины передается на воздушный винт.
Мощность турбины ТВВД при прочих равных условиях больше мощности ТРД.
Тяга ТВВД создается в основном воздушным винтом (85-90 %) и только частично реактивной струее.
Трехвальные ТВВД отличаются относительной простотой регулирования и согласования работы газогенераторов, однако применение редуктора несколько утяжеляет конструкцию и усложняет эксплуатацию силовой установки.
ТВВД предназначены для установки на транспортные, пассажирские и вспомогательные самолеты, для которых скорость полета не очень важна. ГТД со свободной турбиной (турбовальные двигатели) широко используются на силовых установках современных вертолетов.
В данном курсовом проекте был спроектирован редуктор, выполненный по схеме разомкнутого дифференциального планетарного механизма, для высотного винтовентиляторного двигателя.
Планетарный редуктор выполнен по схеме АІ.
Подбор чисел зубьев проведем по так называемым генеральным уравнениям, которые получаются совместным решением уравнений передаточного отношения (ПО), уравнений соосности, условий сборки с привлечением дополнительных зависимостей – параметров, характеризующих, как правило, конструктивные особенности и определяющих будущие свойства механизма. Для замкнутого планетарного механизма следует добавить уравнение соосности и необходимые параметры для цепи замыкания.
ПО редуктора:
![]()


![]()
Для простого планетарного AI – механизма с цилиндрическими колесами генеральные уравнения имеют вид:
![]()
![]()
где: ![]() – любое целое число;
– любое целое число;
![]() – число сателлитов,
– число сателлитов, ![]() ;
;
![]()
![]()
![]()
При подборе чисел зубьев необходимо, чтобы выполнялся ряд условий.
Уравнение соосности:
![]()
![]()
Условие соседства:
![]()
![]()

![]()
Условие сборки:
![]()
2. Расчет на прочность зубчатых передач
2.1 Проектировочный расчет I-ой ступени
Таблица 2.1 Материалы и их свойства
| Элемент передачи | Размерность | Шестерня | Колесо (сателлит) |
| Заготовка | Поковка | Поковка | |
| Материал | Сталь 20Х2Н4А | Сталь 12Х2Н4А | |
| Термообработка | Цементация с закалкой | Цементация с закалкой | |
|
|
МПа | 1400 | 1200 |
|
|
МПа | 1200 | 1000 |
| Твердость сердцевины | НВ | 350 | 330 |
| Твердость поверхности | HRC | 65 | 62 |
| Базовые числа циклов |
|
|
2.1.1 Определение передаточного отношения
2.1.2 Определение крутящего момента на шестерне при трех режимах нагружения



2.1.3 Определение эквивалентных чисел циклов перемены напряжений
а) по контактной прочности:
- для шестерни

- для колеса

где: ![]() и
и ![]() количество контактов
шестерни и сателлита;
количество контактов
шестерни и сателлита;
![]()
![]()
![]()
![]()
б) по изгибной прочности:
- для шестерни


где: ![]() ;
;
- для колеса

2.1.4 Определение допускаемых контактных напряжений
Для этого рассчитываются значения коэффициентов
долговечности для шестерни и колеса. Так как ![]() и
и ![]() больше базовых значений,
то величины
больше базовых значений,
то величины ![]() вычисляются по
зависимостям
вычисляются по
зависимостям
![]()
![]()
Базовый предел контактной выносливости:
а) для шестерни при ![]()
![]()
б) для колеса при ![]()
![]()
Для поверхносно-упрочнённых зубьев ![]() .
.
При выполнении проектировочного расчета следует принять
![]()
где: ![]() коэффициент учитывающий
шероховатость;
коэффициент учитывающий
шероховатость;
![]() коэффициент учитывающий
окружную скорость;
коэффициент учитывающий
окружную скорость;
![]() коэффициент учитывающий влияние
смазки;
коэффициент учитывающий влияние
смазки;
![]() коэффициент учитывающий
размер зубчатого колеса.
коэффициент учитывающий
размер зубчатого колеса.


В качестве допускаемых напряжений принимается меньшее из
двух значений ![]()
Нахождение допускаемых изгибных напряжений. Для
нереверсивной передачи произведение ![]() близко к единице,
близко к единице, ![]()
где: ![]() коэффициент учитывающий
шероховатость переходной поверхности;
коэффициент учитывающий
шероховатость переходной поверхности;
![]() коэффициент учитывающий
размер зубчатого колеса;
коэффициент учитывающий
размер зубчатого колеса;
![]() коэффициент учитывающий градиент
напряжений и чувствительность материала к концентрации напряжений;
коэффициент учитывающий градиент
напряжений и чувствительность материала к концентрации напряжений;
![]() коэффициент учитывающий
влияние двустороннего приложения нагрузки.
коэффициент учитывающий
влияние двустороннего приложения нагрузки.
![]() коэффициент долговечности;
коэффициент долговечности;

где: ![]() предел выносливости при
изгибе соответствующий базовому числу циклов напряжений;
предел выносливости при
изгибе соответствующий базовому числу циклов напряжений;
![]() коэффициент запаса
прочности;
коэффициент запаса
прочности;
![]() коэффициент долговечности.
коэффициент долговечности.
Коэффициент долговечности ![]() равен единице, так как
равен единице, так как ![]() и
и ![]() больше, чем
больше, чем ![]() .
.
2.1.5 Определение начального (делительного) диаметра шестерни
где: ![]() относительная ширина
зубчатого венца;
относительная ширина
зубчатого венца;
![]() вспомогательный
коэффициент;
вспомогательный
коэффициент;
![]() коэффициент долговечности;
коэффициент долговечности;
![]() расчетный момент с учетом
распределения мощности между сателлитами;
расчетный момент с учетом
распределения мощности между сателлитами;
![]()
где: ![]() коэффициент который
учитывает неравномерность распределения нагрузки между сателлитами;
коэффициент который
учитывает неравномерность распределения нагрузки между сателлитами;

Определение кругового модуля
Ближайшее стандартное значение ![]()
2.1.6 Геометрический расчет зубчатой передачи
С учетом выбранных коэффициентов смещения ![]() и параметров исходного
производящего контура
и параметров исходного
производящего контура ![]()
Определение угла эксплуатационного зацепления ![]() :
:


![]()
Определение межосевого расстояния ![]() :
:

Определение диаметров делительных окружностей ![]() :
:
![]()
![]()
![]()
![]()
Определение диаметров начальных окружностей ![]() :
:



2.2 Проверочный расчет I-ой ступени
2.2.1 Проверка передачи на контактную выносливость
В соответствии с рекомендациями ГОСТ 21354-87 для
стальных колес, коэффициент учитывающий механические свойства материалов
сопряженных колес ![]()
Определение коэффициента воспринимаемого смещения ![]() :
:


Определение коэффициента уравнительного смещения ![]()
![]()
![]()
![]()
Определение диаметров основных окружностей ![]() :
:
![]()
![]()
![]()
![]()
Определение диаметров окружностей вершин ![]() :
:
для внешнего зацепления:
![]()
![]()
![]()
для внутреннего зацепления:
![]()

Определение диаметров окружностей впадин ![]() :
:
для внешнего зацепления:
![]()
![]()
![]()
для внутреннего зацепления:
![]()
![]()
Нахождение коэффициента учитывающего суммарную длину контактных линий
Определение коэффициента перекрытия:
![]()
Коэффициент, учитывающий форму сопряженных поверхностей зубьев в полюсе зацепления. При угле зацепления

Ширина шестерни
![]()
Принимается ![]()
Уточнение значения ![]()
Так как ![]() изменилась мало, то
изменилась мало, то ![]() остается неизменным.
остается неизменным.
Расчет коэффициента ![]()

![]()
Для данной передачи принято 5-й степень точности, как
видно передача работает с окружной скоростью ![]() , и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
, и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
Для кромочного удара:
- определение удельной передаваемой нагрузки

где: ![]() коэффициент который
учитывает динамические нагрузки, связанные с крутильными колебаниями системы;
коэффициент который
учитывает динамические нагрузки, связанные с крутильными колебаниями системы;

- вычисление вероятной максимальной разности основных шагов

где: ![]() допуски на величину
основного шага;
допуски на величину
основного шага;
- определение относительной ошибки основного шага

![]()
- отношение радиусов кривизны эвольвент при входе зубьев в зацепление
- время кромочного контакта зубьев вне линии зацепления

- период собственных колебаний сопряженных колес

- параметр
Так как ![]() , то при кромочном ударе
, то при кромочном ударе
![]() ,
,
![]()
но так как при кромочном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для срединного удара:
- отношение радиусов кривизны эвольвент при выходе зубьев из зацепления

- характеристическое время срединного удара

- параметр

Так как ![]() , то при срединном ударе
, то при срединном ударе
![]()
![]()
но так как при срединном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для дальнейших расчетов принимаем ![]() при срединном ударе
при срединном ударе ![]()
Коэффициент расчетной нагрузки при окончательном расчете
на контактную ![]() выносливость;
выносливость;
![]()
![]()
где: ![]() коэффициент, учитывающий
распределение нагрузки между зубьями;
коэффициент, учитывающий
распределение нагрузки между зубьями;
Расчетное значение контактных напряжений


Сравнение расчетных напряжений с допускаемыми

Небольшая перегрузка, что допускается.
2.2.2 Проверка передачи на изгибную прочность
Коэффициент внутренней динамической нагрузки
Для данной передачи принято 5-й степень точности, как
видно передача работает с окружной скоростью ![]() , и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
, и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
Для кромочного удара:
- определение удельной передаваемой нагрузки

Значение ![]() определяется следующим
образом:
определяется следующим
образом:
![]()
где: ![]() для прямозубых колёс;
для прямозубых колёс;
![]() коэффициент торцового
перекрытия;
коэффициент торцового
перекрытия;
![]()

- вычисление вероятной максимальной разности основных шагов

где: ![]() допуски на величину
основного шага;
допуски на величину
основного шага;
- определение относительной ошибки основного шага

![]()
- отношение радиусов кривизны эвольвент при входе зубьев в зацепление
- время кромочного контакта зубьев вне линии зацепления

- период собственных колебаний сопряженных колес

- параметр
Так как ![]() , то при кромочном ударе
, то при кромочном ударе
![]() ,
,
![]()
но так как при кромочном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для срединного удара:
- отношение радиусов кривизны эвольвент при выходе зубьев из зацепления

- характеристическое время срединного удара

- параметр

Так как ![]() , то при срединном ударе
, то при срединном ударе

![]()
но так как при срединном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для дальнейших расчетов принимаем ![]() при срединном ударе
при срединном ударе ![]()
Определение коэффициентов расчётной нагрузки при
окончательном расчете на изгибную ![]() выносливость
выносливость
![]()
![]()
Определение коэффициента формы зуба шестерни и колеса:




Местное изгибное напряжение:

![]()
где: ![]() коэффициент, учитывающий
наклон зуба;
коэффициент, учитывающий
наклон зуба;
![]() коэффициент, учитывающий
перекрытие зубьев.
коэффициент, учитывающий
перекрытие зубьев.
2.3 Проектировочный расчет II-ой ступени
Таблица 2.2 Материалы и их свойства
| Элемент передачи | Размерность | Сателлит | Колесо (венец) |
| Заготовка | Поковка | Поковка | |
| Материал | Сталь 12Х2Н4А | Сталь 38ХМЮА | |
| Термообработка | Цементация с закалкой | Азотирование | |
|
|
МПа | 1200 | 1000 |
|
|
МПа | 1000 | 850 |
| Твердость сердцевины | НВ | 330 | 350 |
| Твердость поверхности | HRC | 62 | 60 |
| Базовые числа циклов |
|
|
2.3.1 Определение передаточного отношения

![]()
2.3.2 Определение крутящего момента на шестерне при трех режимах нагружения






2.3.3 Определение эквивалентных чисел циклов перемены напряжений
а) по контактной прочности:
- для сателлита
![]()
- для колеса

где: ![]() количество контактов сателлита
и колеса;
количество контактов сателлита
и колеса;
б) по изгибной прочности:
- для сателлита
![]()
- для колеса

2.3.4 Определение допускаемых контактных напряжений
Для этого рассчитываются значения коэффициентов
долговечности для шестерни и колеса. Так как ![]() и
и ![]() больше базовых значений,
то величины
больше базовых значений,
то величины ![]() вычисляются по
зависимостям
вычисляются по
зависимостям
![]()
![]()
Базовый предел контактной выносливости:
а) для сателлита при ![]()
![]()
б) для колеса при ![]()
![]()
Для поверхносно-упрочнённых зубьев ![]() .
.
При выполнении проектировочного расчета следует принять
![]()
где: ![]() коэффициент учитывающий
шероховатость;
коэффициент учитывающий
шероховатость;
![]() коэффициент учитывающий
окружную скорость;
коэффициент учитывающий
окружную скорость;
![]() коэффициент учитывающий
влияние смазки;
коэффициент учитывающий
влияние смазки;
![]() коэффициент учитывающий
размер зубчатого колеса.
коэффициент учитывающий
размер зубчатого колеса.


В качестве допускаемых напряжений принимается меньшее из
двух значений ![]()
Нахождение допускаемых изгибных напряжений. Для нереверсивной
передачи произведение ![]() близко к единице,
близко к единице, ![]()
где: ![]() коэффициент учитывающий
шероховатость переходной поверхности;
коэффициент учитывающий
шероховатость переходной поверхности;
![]() коэффициент учитывающий
размер зубчатого колеса;
коэффициент учитывающий
размер зубчатого колеса;
![]() коэффициент учитывающий
градиент напряжений и чувствительность материала к концентрации напряжений;
коэффициент учитывающий
градиент напряжений и чувствительность материала к концентрации напряжений;
![]() коэффициент учитывающий
влияние двустороннего приложения нагрузки.
коэффициент учитывающий
влияние двустороннего приложения нагрузки.
![]() коэффициент долговечности;
коэффициент долговечности;

где: ![]() предел выносливости при
изгибе соответствующий базовому числу циклов напряжений;
предел выносливости при
изгибе соответствующий базовому числу циклов напряжений;
![]() коэффициент запаса
прочности;
коэффициент запаса
прочности;
![]() коэффициент долговечности.
коэффициент долговечности.
Коэффициент долговечности ![]() равен единице, так как
равен единице, так как ![]() и
и ![]() больше, чем
больше, чем ![]() .
.
2.4 Проверочный расчет II-ой ступени
2.4.1 Проверка передачи на контактную выносливость
В соответствии с рекомендациями ГОСТ 21354-87 для
стальных колес, коэффициент учитывающий механические свойства материалов
сопряженных колес ![]()
Нахождение коэффициента учитывающего суммарную длину контактных линий
Определение коэффициента перекрытия:
![]()
Коэффициент, учитывающий форму сопряженных поверхностей зубьев в полюсе зацепления. При угле зацепления

Ширина шестерни
![]()
Принимается ![]()
Уточнение значения ![]()
Так как ![]() изменилась мало, то
изменилась мало, то ![]() остается неизменным.
остается неизменным.
Расчет коэффициента ![]()
![]()
![]()
Для данной передачи принято 5-й степень точности, как
видно передача работает с окружной скоростью ![]() , и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
, и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
Для кромочного удара:
- определение удельной передаваемой нагрузки

где: ![]() коэффициент который
учитывает динамические нагрузки, связанные с крутильными колебаниями системы;
коэффициент который
учитывает динамические нагрузки, связанные с крутильными колебаниями системы;

- вычисление вероятной максимальной разности основных шагов

где: ![]() допуски на величину
основного шага;
допуски на величину
основного шага;
- определение относительной ошибки основного шага

![]()
- отношение радиусов кривизны эвольвент при входе зубьев в зацепление
- время кромочного контакта зубьев вне линии зацепления

- период собственных колебаний сопряженных колес

- параметр
Так как ![]() , то при кромочном ударе
, то при кромочном ударе
![]() ,
,
![]()
но так как при кромочном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для срединного удара:
- отношение радиусов кривизны эвольвент при выходе зубьев из зацепления

- характеристическое время срединного удара

- параметр

Так как ![]() , то при срединном ударе
, то при срединном ударе
![]()
![]()
но так как при срединном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для дальнейших расчетов принимаем ![]() при срединном ударе
при срединном ударе ![]()
Коэффициент расчетной нагрузки при окончательном расчете
на контактную ![]() выносливость;
выносливость;
![]()
![]()
где: ![]() коэффициент, учитывающий
распределение нагрузки между зубьями;
коэффициент, учитывающий
распределение нагрузки между зубьями;
Расчетное значение контактных напряжений

Сравнение расчетных напряжений с допускаемыми

Небольшая недогрузка, что допускается.
2.4.2 Проверка передачи на изгибную прочность
Коэффициент внутренней динамической нагрузки
Для данной передачи принято 5-й степень точности, как
видно передача работает с окружной скоростью ![]() , и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
, и поэтому коэффициент
учитывающий внутреннюю динамическую нагрузку определяется следующим образом.
Для кромочного удара:
- определение удельной передаваемой нагрузки

Значение ![]() определяется следующим
образом:
определяется следующим
образом:
![]()
где: ![]() для прямозубых колёс;
для прямозубых колёс;
![]() коэффициент торцового
перекрытия;
коэффициент торцового
перекрытия;
![]()

- вычисление вероятной максимальной разности основных шагов

где: ![]() допуски на величину
основного шага;
допуски на величину
основного шага;
- определение относительной ошибки основного шага

![]()
- отношение радиусов кривизны эвольвент при входе зубьев в зацепление
- время кромочного контакта зубьев вне линии зацепления

- период собственных колебаний сопряженных колес

- параметр
Так как ![]() , то при кромочном ударе
, то при кромочном ударе
![]() ,
,
![]()
но так как при кромочном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для срединного удара:
- отношение радиусов кривизны эвольвент при выходе зубьев из зацепления

- характеристическое время срединного удара

- параметр

Так как ![]() , то при срединном ударе
, то при срединном ударе
![]()
![]()
но так как при срединном ударе ![]() не может превышать
не может превышать ![]() , то принимаем что
, то принимаем что ![]() .
.
Для дальнейших расчетов принимаем ![]() при срединном ударе
при срединном ударе ![]()
Определение коэффициентов расчётной нагрузки при
окончательном расчете на изгибную ![]() выносливость
выносливость
![]()
![]()
Определение коэффициента формы зуба шестерни и колеса:




Местное изгибное напряжение:


где: ![]() коэффициент, учитывающий
наклон зуба;
коэффициент, учитывающий
наклон зуба;
![]() коэффициент, учитывающий
перекрытие зубьев.
коэффициент, учитывающий
перекрытие зубьев.
3. Силовой анализ рассматриваемого механизма
Дифференциальная зубчатая передача позволяет разделить одно движение на два. Данная передача вращает два воздушных винтовентилятора с равными частотами вращения в противоположные стороны. При вращении винтовентиляторов в разные стороны выходит
![]()
Моменты на валах находятся из уравнения сил на сателлите
![]()
где: ![]() окружная сила на
сателлите.
окружная сила на
сателлите.
Так как ![]() , то соотношение моментов
на валах будет равно
, то соотношение моментов
на валах будет равно


Особенности расчета сил в многосателлитном дифференциальном механизме обусловлены особым характером распределения нагрузки по нескольким зацеплениям центрального колеса с сателлитами, как правило, неравномерным.
С учетом неравномерности распределения нагрузки максимальное окружное усилие в зацеплении центрального колеса с одним из сателлитов определяется как:
где: ![]() крутящий момент,
приложенный к центральному i-тому колесу;
крутящий момент,
приложенный к центральному i-тому колесу;
![]() диаметр начальной
окружности центрального колеса;
диаметр начальной
окружности центрального колеса;
![]() коэффициент неравномерности
распределения нагрузки по сателлитам;
коэффициент неравномерности
распределения нагрузки по сателлитам;
![]() число сателлитов.
число сателлитов.
Определим окружные усилия в зубчатых колесах :


3.2 Определение моментов на валах крутящий момент действующий на вал заднего винта
![]()

-крутящий момент действующий на вал переднего винта;
![]()
![]()
Определим распределение мощностей между винтами:
![]()
![]()
![]()
![]()
т.е. на передний винт передается мощности:

на задний соответственно

4. Проектирование валов и осей
Вал – деталь, предназначенная для передачи вращающего момента вдоль своей оси и для поддержания вращающихся деталей машин. Он также подвержен действию поперечных сил и изгибающих моментов.
Ведущий вал-рессора передает крутящий момент от ротора двигателя к редуктору. Вал полый, изготовлен из стали 30ХГСА, термообработан (закалка).
Диаметр вала определяется по условию расчета на кручение:
где: ![]() крутящий момент на
шестерне z1;
крутящий момент на
шестерне z1;
![]() полярный момент сопротивления
сечения вала;
полярный момент сопротивления
сечения вала;
где: ![]() наружный диаметр вала;
наружный диаметр вала;
![]() Примем
Примем ![]() ;
;
![]() допускаемое напряжение
кручения. Для стали 30ХГСА
допускаемое напряжение
кручения. Для стали 30ХГСА ![]() .
.
![]()
отсюда

принимается ![]()
Внутренний диаметр вала-рессоры:
![]()
принимается ![]()
Валы винтов служат для передачи крутящего момента на
винты. Валы – пустотелые (примем ![]() для вала переднего и
для вала переднего и ![]() для заднего вала), передний
вал изготовлен из стали 38ХГСА, вал заднего винта – из стали 12Х2Н4А.
для заднего вала), передний
вал изготовлен из стали 38ХГСА, вал заднего винта – из стали 12Х2Н4А.
Для термообработанной (закалка с охлаждением в масле) стали 38ХГСА:
![]() .
.
Для термообработанной (закалка ТВЧ) стали 12Х2Н4A
![]() .
.
Диаметр вала винта определяем по условию расчета на кручение:
где: ![]() крутящий момент на валу
винта;
крутящий момент на валу
винта;

![]()

Принимаем ![]() для того что бы через него
свободно мог пройти передний вал.
для того что бы через него
свободно мог пройти передний вал.
![]()
4.2 Проверочный расчет заднего вала винтовентилятора
Составим расчетную схему. Валы представим как балки на двух опорах: шарнирно-неподвижной и шарнирно-подвижной (роликовый подшипник):
Определим реакции в опорах:
Основными нагрузками, действующими на вал редуктора, являются:
1. Максимальный вращающий момент ![]() ;
;
2.Сила тяги винта F, растягивающая вал. Максимальное значение силы тяги при работе винта на старте определяют из выражения:
где: ![]() мощность двигателя, кВт;
мощность двигателя, кВт;
![]() КПД винта;
КПД винта;
![]() скорость полета самолета.
скорость полета самолета.

3. Вес винтовентилятора G ![]() , для учета сил инерции
умножаем на коэффициент перегрузки силовой установки
, для учета сил инерции
умножаем на коэффициент перегрузки силовой установки ![]() :
:
![]()
![]()
4. Центробежная сила неуравновешенных масс винта Fцб, которой обычно пренебрегают вследствие ее малости по сравнению с другими силами;
5. Гироскопический момент Мг, возникающий при эволюции самолета, когда изменяется направление оси вращения винта.
![]()
где: ![]() – момент инерции винта;
– момент инерции винта;
![]() – угловая скорость
вращения вала винта;
– угловая скорость
вращения вала винта;
![]() – средняя угловая скорость
вращения самолета в пространстве;
– средняя угловая скорость
вращения самолета в пространстве;
![]()
где: m – масса винта;
r – радиус инерции, который определяем через наибольший радиус
лопасти ![]() ;
;
![]()
где: коэффициент ε для дуралюминовых лопастей примем
![]() ,
,
![]()
![]()

![]()
где: nг – коэффициент перегрузки. Примем nг = 2;
V – скорость полета при эволюции. Примем V = 70 м/с.
![]()
Составим уравнения равновесия моментов относительно точек А и В для заднего вала:
относительно точки А:
![]()

относительно точки B:
![]()

Определим суммарные изгибающие моменты на заднем валу:
![]()
![]()
Проверяем статическую прочность вала в опасном сечении.
Расчет на статическую прочность валов производят в целях предупреждения остаточной пластичной деформации в том случае, если вал работает с большими перегрузками (кратковременными).
Эквивалентные напряжения определяем по3-й теории прочности:
где: ![]() напряжение изгиба в
опасном сечении:
напряжение изгиба в
опасном сечении:

![]() напряжение кручения в
опасном сечении:
напряжение кручения в
опасном сечении:

![]()
![]() коэффициент запаса
прочности. Примем
коэффициент запаса
прочности. Примем ![]() ;
;
![]() предел текучести для стали
30ХГСА для переднего вала;
предел текучести для стали
30ХГСА для переднего вала;
![]() предел текучести для стали
40ХН для заднего вала;
предел текучести для стали
40ХН для заднего вала;
Допускаемое напряжение:
![]()
![]()
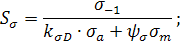
Расчет на выносливость проводят в форме проверки коэффициента запаса прочности по усталости. При совместном действии изгиба и кручения запас усталостной прочности определяют по формуле:
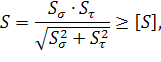
где: ![]() коэффициент запаса по
нормальным напряжениям (отсутствие кручения);
коэффициент запаса по
нормальным напряжениям (отсутствие кручения);
![]() коэффициент запаса по
касательным напряжениям (отсутствие изгиба);
коэффициент запаса по
касательным напряжениям (отсутствие изгиба);
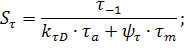
где: ![]() и
и ![]() пределы выносливости
материала соответственно при изгибе и кручении с симметричным знакопеременным
циклом. Для стали 40ХН:
пределы выносливости
материала соответственно при изгибе и кручении с симметричным знакопеременным
циклом. Для стали 40ХН: ![]()
![]() коэффициенты,
характеризующие чувствительность материала к асимметрии цикла напряжений:
коэффициенты,
характеризующие чувствительность материала к асимметрии цикла напряжений: ![]() определяем из рекомендаций
[4];
определяем из рекомендаций
[4];
![]() амплитудные напряжения;
амплитудные напряжения;
![]() средние значения
напряжений;
средние значения
напряжений;
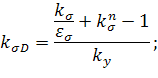
![]() суммарные коэффициенты,
учитывающие влияние всех факторов на сопротивление усталости при изгибе и
кручении:
суммарные коэффициенты,
учитывающие влияние всех факторов на сопротивление усталости при изгибе и
кручении:
![]()
![]()
![]()
![]()
где: ![]() коэффициент асимметрии
цикла изменения нормальных напряжений. Для валов вращающихся не относительно
векторов нагрузок
коэффициент асимметрии
цикла изменения нормальных напряжений. Для валов вращающихся не относительно
векторов нагрузок ![]() ;
;
![]() для валов работающих при
нереверсивной нагрузке
для валов работающих при
нереверсивной нагрузке ![]()
![]()
![]()
где: ![]() коэффициенты абсолютных
размеров поперечного сечения.
коэффициенты абсолютных
размеров поперечного сечения.
Для заднего ![]() ;
;
![]() коэффициент влияния
шероховатости поверхности, при шлифовании
коэффициент влияния
шероховатости поверхности, при шлифовании ![]()
![]() коэффициент влияния
упрочнения, вводимый для валов с поверхностным упрочнением
коэффициент влияния
упрочнения, вводимый для валов с поверхностным упрочнением ![]() ;
;
![]() эффективные коэффициенты
концентрации напряжений. Для вала на котором иметься шлицы
эффективные коэффициенты
концентрации напряжений. Для вала на котором иметься шлицы ![]() , а
, а ![]()


![]() условие выполняется.
условие выполняется.
4.3 Проектирование оси сателлита
Ось – деталь, предназначенная для поддержания вращающихся деталей и не передающая полезного вращающего момента. Она подвержена действию изгибающих моментов.
Составляем расчетную схему оси сателлита:
1) ![]() максимальная окружная на
водиле.
максимальная окружная на
водиле.
2) Определяем опорные: из схемы очевидно что опорные
реакции будут равны половине ![]() с противоположным знаком
с противоположным знаком
3) Определение изгибающего момента

4)Назначаем материал оси : сталь 20Х2Н4А закаленная с
охлаждением в масле для которой [![]() ]=320МПа-при симметричной
знакопеременной нагрузке
]=320МПа-при симметричной
знакопеременной нагрузке
Коэффициент относительной толщины принимаем равным ![]()
Предварительно определяем диаметр оси из расчета на изгиб:


Принимаем ![]()
5. Проектирование подшипников
5.1 Расчет роликоподшипника сателлита
На ось устанавливаем на 2 роликовых подшипника 42610 по ГОСТ 8328-75 с короткими цилиндрическими роликами.
Подшипник проверяем по условию: ![]()
Основные параметры подшипника:
Наружный диаметр: ![]() ;
;
Внутренний диаметр: ![]()
Ширина кольца:![]() ;
;
Статическая грузоподемность: ![]() .
.
Динамическая грузоподъемность
![]()
Расчетная динамическая грузоподъемность:
где: L – расчетный ресурс в миллионах оборотов;
![]() коэффициент надежности,
который зависит от вероятности неразрушения которую примем равной 90
коэффициент надежности,
который зависит от вероятности неразрушения которую примем равной 90![]() ,тогда
,тогда ![]() ;
;
![]() коэффициент зависящий от
свойств материала и условий работы, который при отсутствии повышенных перекосов
и наличии масляной пленки в контактах, при изготовлении тел качения из
электрошлаковой или вакуумной стали для роликового подшипника равен:
коэффициент зависящий от
свойств материала и условий работы, который при отсутствии повышенных перекосов
и наличии масляной пленки в контактах, при изготовлении тел качения из
электрошлаковой или вакуумной стали для роликового подшипника равен: ![]() ;
;
![]() показатель степени, для
роликоподшипников
показатель степени, для
роликоподшипников ![]() ;
;
![]() эквивалентная нагрузка
эквивалентная нагрузка
где ![]() расчетный ресурс, ч;
расчетный ресурс, ч;
Определяем обороты оси:
![]()

![]()
где: ![]() коэффициент вращения
коэффициент вращения ![]()
![]() коэффициент безопасности
зависящий от характера нагрузки, примем при нагрузке с умеренными толчками
коэффициент безопасности
зависящий от характера нагрузки, примем при нагрузке с умеренными толчками ![]() ;
;
![]() коэффициент учитывающий
влияние температуры, при
коэффициент учитывающий
влияние температуры, при ![]()
![]() ;
;
![]() коэффициент
эквивалентности учитывающий переменность режима нагрузки:
коэффициент
эквивалентности учитывающий переменность режима нагрузки:
![]() соответствует среднему
равновероятному режиму нагружения;
соответствует среднему
равновероятному режиму нагружения;
![]() радиальная нагрузка. Для
прямозубых цилиндрических колес
радиальная нагрузка. Для
прямозубых цилиндрических колес
![]()
![]()
![]() то есть условие выполняется
то есть условие выполняется
5.2 Проверочный расчет шарикового радиально-упорного подшипника
Подшипник проверяем по условию: ![]()
В качестве задней опоры вала заднего винта, воспринимающей, осевые нагрузки от тяги двух винтов используем подшипник 1176934 по ГОСТ 8995-75 – особолегкой серии шариковый радиально-упорный однорядный с разъемным внутренним кольцом (четырехточечный контакт). Ввиду большой осевой нагрузки установим на вал 2 подшипника.
Основные параметры подшипника:
Наружный диаметр: ![]() ;
;
Внутренний диаметр: ![]()
Ширина кольца:![]() ;
;
Статическая грузоподемность: ![]() .
.
Динамическая грузоподъемность
![]()
Расчетная динамическая грузоподъемность:
где ![]() показатель степени, для шарикоподшипников
показатель степени, для шарикоподшипников
![]() ;
;
Определяем обороты оси:

![]()
где: ![]() коэффициент вращения
коэффициент вращения ![]()
![]() коэффициент безопасности
зависящий от характера нагрузки, примем при нагрузке с умеренными толчками
коэффициент безопасности
зависящий от характера нагрузки, примем при нагрузке с умеренными толчками ![]() ;
;
![]() коэффициент учитывающий
влияние температуры, при
коэффициент учитывающий
влияние температуры, при ![]()
![]() ;
;
![]() коэффициент
эквивалентности учитывающий переменность режима нагрузки:
коэффициент
эквивалентности учитывающий переменность режима нагрузки:
![]() соответствует среднему
равновероятному режиму нагружения;
соответствует среднему
равновероятному режиму нагружения;
![]() радиальная нагрузка,
данный подшипник не воспринимает радиальной нагрузки, а воспринимает только
осевую
радиальная нагрузка,
данный подшипник не воспринимает радиальной нагрузки, а воспринимает только
осевую
![]()
где ![]() коэффициенты радиальной и
осевой нагрузок
коэффициенты радиальной и
осевой нагрузок
![]() то есть условие выполняется
то есть условие выполняется
5.3 Проверочный расчет роликового подшипника
В качестве передней опоры вала заднего винта, воспринимающей, радиальные нагрузки используем стандартный подшипник 1032944 по ГОСТ 8328-75 – сверхлегкой серии роликовый радиальный с короткими цилиндрическими роликами, без буртиков на внутреннем кольце (т.е. он позволяет осевые перемещения).
Основные параметры подшипника:
Наружный диаметр: ![]() ;
;
Внутренний диаметр: ![]()
Ширина кольца:![]() ;
;
Статическая грузоподемность: ![]() .
.
Динамическая грузоподъемность
![]()
Расчетная динамическая грузоподъемность:
![]()
![]() то есть условие выполняется
то есть условие выполняется
6.1 Расчет болтового соединения
Вал винта соединяется с винтом двигателя с помощью 20 болтов, расположенных на торце фланца передней части вала.
Установим болты с затяжкой. Затяжка необходима для создания сил трения в стыке при действии поперечных нагрузок, обеспечения герметичности стыка, повышения усталостной прочности болтов.
На болты действует растягивающая сила F – сила тяги винта, а также изгибающие моменты – гироскопический и момент от веса винта (см. рис 6.1.)
Допускаемые напряжения растяжения в болте не должны
превышать допускаемые: ![]()
где ![]() расчетная нагрузка (c
учетом скручивания тела болта):
расчетная нагрузка (c
учетом скручивания тела болта):
![]()
где: ![]() усилия в наиболее
нагруженном болте;
усилия в наиболее
нагруженном болте;
![]() диаметр болта;
диаметр болта;
![]() допускаемое напряжение
растяжения. Болты изготовлены из стали 40ХН, закаленной.
допускаемое напряжение
растяжения. Болты изготовлены из стали 40ХН, закаленной.
![]()
где ![]() сила затяжки. Введем
коэффициент запаса по затяжке
сила затяжки. Введем
коэффициент запаса по затяжке ![]()
![]()
где ![]() коэффициент основной
нагрузки. Примем
коэффициент основной
нагрузки. Примем ![]() ;
;
![]()
где ![]() усилие в болтах, возникающее
от изгибающего момента;
усилие в болтах, возникающее
от изгибающего момента;
![]() усилие, возникающее в
болтах от силы тяги.
усилие, возникающее в
болтах от силы тяги.
где ![]() суммарный изгибающий
момент:
суммарный изгибающий
момент:
![]()
где ![]() расстояние между центрами
тяжести винта и фланца вала
расстояние между центрами
тяжести винта и фланца вала
![]()
![]()
![]()
![]()
![]()
![]()
Максимальное усилие возникает в первом болте,
следовательно, расчет ведем по ![]() .
.
![]()
![]()
![]()

6.2 Проверочный расчет шлицевых соединений на прочность
Для передачи крутящего момента в машиностроении часто используют шлицевые соединения. Они имеют ряд преимуществ по сравнения с другими видами соединения: высокая прочность зубьев на изгиб и на смятие; возможность передачи большего крутящего момента и т.д.
Рассчитаем шлицевое соединение для передачи крутящего момента от вала турбины, к редуктору используя эвольвентный профиль зубьев.
Расчет заключается в определении минимальной длины шлицов, необходимой для передачи крутящего момента. Расчет проводится на смятие по боковым поверхностям зубьев.
Расчёт шлицов на заднем хвостовике вала-рессоры которые передают крутящий момент ротора компрессора:
 ,
,
Расчет шлицев шестерни 105х5х38 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
Расчет шлицев заднего вала 170х2,5х28 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
Расчет шлицев переднего вала 110х3х120 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
7. Техническое описание редуктора
Редуктор (рис7.1) предназначен для передачи мощности турбины винтовентилятора на два соосных винтовентилятора. Винтовентиляторы вращаются в противоположные стороны с частотой, меньшей в 6,667 раза частоты вращения ротора турбины винтовентилятора. На передний винтовентилятор передается 57,86% мощности турбины, на задний 42,14% при равных частотах вращения винтовентиляторов. Редуктор однорядный планетарный дифференциального типа, расположен в передней части двигателя.
Редуктор состоит из корпуса 25 сателлитов, пяти сателлитов 12, венца (колеса внутреннего зацепления) 11, вала 1 винта, гидравлического измерителя 4 тяги, корпуса 6 редуктора, диафрагмы 24. Корпус 25 сателлитов соединен с передним винтовентилятором шлицами и опирается спереди на вал переднего винтовентилятора, а сзади - на шариковый подшипник 14. Осевые нагрузки от корпуса сателлитов передаются на вал винта межвальным шариковым подшипником 29. На корпусе 25 сателлитов установлена шестерня 15, которая служит для привода регулятора частоты вращения переднего винтовентилятора и обеспечения кинематической связи с валиком стояночного тормоза переднего винтовентилятора. Эта шестерня является также индуктором для датчиков 13 частоты вращения и синхрофазирования переднего винтовентилятора. В корпусе сателлитов установлены пять сателлитов 12 на двух роликовых подшипниках 10 каждый.
В зацеплении с сателлитами 12 находится ведущая шестерня 23, которая установлена на валопровод 22. Валопровод 22 соединяется с валом 19 турбины винтовентилятора шлицами и винтовым замком 20. Валопровод 22 установлен на двух подшипниках - шариковом 17 и межвальном роликовом 18. На валопроводе 22 также установлена шестерня 16, служащая для привода регулятора частоты вращения заднего вштовентилятора, самолетных агрегатов и обеспечения кинематической связи с валиком стояночного, тормоза заднего винтовентилятора.
Сателлиты в свою очередь зацепляются с венцом 11 (колесом внутреннего зацепления). Венец 11 соединен шлицами со ступицей 5, закрепленной на валу 1 винта.
Вал винта установлен в корпусе редуктора 6 на двух роликовых подшипниках 30 и 26, воспринимающих все радиальные нагрузки от переднего и заднего винтовентиляторов. На валу винта установлены также два шариковых подшипника 27, воспринимающие и передающие силу тяги винтовентилятора на корпус редуктора 6 через гидравлический измеритель тяги 4. К фланцу вала 1 винта крепится корпус заднего винтовентилятора.
Подвод масла на управление винтовентилятором от регулятора частоты вращения винтовентилятора обеспечивается маслоперепусками: поз.З на валу 1 винта для заднего и поз.21 на корпусе 25 сателлитов для переднего (канат Б1 Ф1 М1 и Б2, Ф2, М2 соответственно).
Каналы управления винтовентилятором расположены в редукторе и непосредственно в винтовентиляторе, и соединяются следующим образом: подводящие масло к заднему винтовентилятору - через втулки 32, а к переднему - через маслоперепускную втулку 33. Корпус 6 редуктора крепится на переднем корпусе 9 двигателя с помощью шпилек 7, и при этом центрируется по втулкам 8. Стык корпусов уплотняется резиновым кольцом. В передней части корпуса 6 редуктора расположены: бобышки со шпильками 2 для крепления воздухозаборника; крышка 36 редуктора с безрасходным уплотнением 31, на которой предусмотрены места для крепления винтами 37 коробок щеткодержателей токосъемников системы обогрева лопастей винтовентилятора; три датчика 35 частоты вращения заднего винтовентилятора; один датчик 28 системы синхрофазирования, а также датчик вибраций МВ - 0,4. Индуктор 34 для датчиков частоты вращения и синхрофазирования установлен на валу 1 винта. Сзади на корпусе 6 редуктора установлена диафрагма 24, в которой размещается подшипник 14.
Внутри корпуса редуктора 6 установлен -гидравлический измеритель 4 тяги.
Измеритель тяги предназначен для измерения величины положительной и отрицательной тяги винтовентилятора, а также для уравнивания загрузки упорных подшипников.
Положительная сила тяги передается на корпус I (рис7.2 ) редуктора от вала 14 винта через подшипники 10, 13 и через корпус 15 измерителя тяги.
В корпусе 15 измерителя тяги установлены равнорасположенные по окружности четыре цилиндра 2 - с пазами на выступающей части, а между цилиндрами 2 установлены четыре цилиндра 16 - без пазов. В цилиндрах 2 установлены поршни 5 с короткими хвостовиками, а в цилиндрах 16 установлены поршни 17 с длинными хвостовиками. Поршни 5 упираются во фланец 12 подшипника 13, а поршни 17 -во фланец 11 подшипника 10. Рабочие полости Б всех цилиндров связаны каналами между собой и соединены через трубопровод и каналы в переднем корпусе двигателя с маслонасосом 4 и информационной системой, измерения давлений 3 двигателя, а на летающей лаборатории - дополнительно с соответствующим датчиком давления 19.
Отрицательная сила тяги передается на корпус 1 редуктора от вала 14 винта через подшипник 10 и через корпус 8 опоры вала винта. В корпусе 8 установлены четыре цилиндра 6 (аналогичных, цилиндрам 2), а в них соответственно четыре поршня 7 (аналогичных поршням 5). Поршни 7 упираются во фланец 11 подшипника 10, Рабочие полости В всех цилиндров связаны каналами между собой 1 и соединяются через трубопровод и каналы в переднем корпусе двигателя с маслонасосом и информационной системой измерения давлений 3 двигателя, а на летающей лаборатории - дополнительно с соответствующим датчиком давления 19.
7.2 Принцип работы редуктора
Крутящий момент от турбины винтовентилятора передается через вал 19 турбины винтовентилятора на валопровод 22 (рис7.1) и ведущую шестерню 23. Далее крутящий момент разделяется на два потока. От сателлитов (поз.12) 57,86% суммарного крутящего момента передается переднему винтовентилятору через корпус 25 сателлитов. Второй поток крутящего момента (42,14% суммарного) передается от венца 11 на задний винтовентилятор валом 1 винта. Сила тяги винтовентилятора передается от вала 1 винта на корпус 6 редуктора двумя шариковыми подшипниками 27 через гидравлический измеритель 4 тяги.
Измеритель тяги (рис7.2) работает следующим образом. При работе двигателя приводится во вращение установленный на коробке приводов маслонасос 4 измерителя тяги. Если сила тяги винтовентилятора отсутствует, то масло из полостей Б и В сливается во-внутреннюю полость корпуса редуктора через отверстия А в поршнях 5 и 7.
При возникновении на валу 14 винта положительной тяги ( +
![]() ), она передается подшипником
13 на фланец 12 и подшипником 10 на фланец 11, а далее соответственно на поршни
5 и 17. Поршни 5 и 17 под действием силы тяги перемещаются внутрь цилиндров 2 и
16, при этом цилиндры 2 перекрывают каналы А в поршнях 5 и слив масла
уменьшается. При этом давление в полостях Б увеличивается до величины,
уравновешивающей силу тяги. Суммарная площадь поршней 5 и 17 - 169,8 см2. При
действии положительной тяги измеритель тяги обеспечивает равномерную загрузку
подшипников 13 и 10 за счет параллельной работы поршней 5 и 17 от общей
гидравлической полости. При повышении давления в канале положительной тяги до
700 кПа (7 кгс/см2) золотник, установленный в маслонасосе 4 между каналами
положительной и отрицательной тяги, перекрывает канал отрицательной тяги, что позволяет
избежать лишней циркуляции масла в корпусе редуктора. При появлении на валу 14
винта отрицательной тяги ( —
), она передается подшипником
13 на фланец 12 и подшипником 10 на фланец 11, а далее соответственно на поршни
5 и 17. Поршни 5 и 17 под действием силы тяги перемещаются внутрь цилиндров 2 и
16, при этом цилиндры 2 перекрывают каналы А в поршнях 5 и слив масла
уменьшается. При этом давление в полостях Б увеличивается до величины,
уравновешивающей силу тяги. Суммарная площадь поршней 5 и 17 - 169,8 см2. При
действии положительной тяги измеритель тяги обеспечивает равномерную загрузку
подшипников 13 и 10 за счет параллельной работы поршней 5 и 17 от общей
гидравлической полости. При повышении давления в канале положительной тяги до
700 кПа (7 кгс/см2) золотник, установленный в маслонасосе 4 между каналами
положительной и отрицательной тяги, перекрывает канал отрицательной тяги, что позволяет
избежать лишней циркуляции масла в корпусе редуктора. При появлении на валу 14
винта отрицательной тяги ( — ![]() ) она передается подшипником
10 на фланец 11, который болтами 18 крепится к фланцу 9, установленному на
наружной обойме подшипника 10. Фланец 11 под действием отрицательной тяги
перемещает поршни 7 вовнутрь цилиндров 6, которые перекрывают в поршнях 7
отверстия А для слива масла. Одновременно поршни 5 и 17 силой давления масла в
полостях Б выдвигаются из цилиндров 2 и 16. При этом открываются отверстия А в
поршнях 5 и давление тела в канале положительной тяги понижается, после чего
золотник, установленный между каналами в маслонасосе 4, открывает канал
отрицательной тяги. Масло поступает в полости В, давление в которых
увеличивается до величины, уравновешивающей силу отрицательной тяги. Суммарная
площадь поршней 7 - 84,9 см2. Давление масла в каналах измерения положительной
и отрицательной тяги, как эквивалент силы тяги, измеряется информационной
системой измерения давлений 3, преобразующей давление в цифровой код,
выдаваемый в электронную систему управления и в бортовую систему контроля
двигателя.
) она передается подшипником
10 на фланец 11, который болтами 18 крепится к фланцу 9, установленному на
наружной обойме подшипника 10. Фланец 11 под действием отрицательной тяги
перемещает поршни 7 вовнутрь цилиндров 6, которые перекрывают в поршнях 7
отверстия А для слива масла. Одновременно поршни 5 и 17 силой давления масла в
полостях Б выдвигаются из цилиндров 2 и 16. При этом открываются отверстия А в
поршнях 5 и давление тела в канале положительной тяги понижается, после чего
золотник, установленный между каналами в маслонасосе 4, открывает канал
отрицательной тяги. Масло поступает в полости В, давление в которых
увеличивается до величины, уравновешивающей силу отрицательной тяги. Суммарная
площадь поршней 7 - 84,9 см2. Давление масла в каналах измерения положительной
и отрицательной тяги, как эквивалент силы тяги, измеряется информационной
системой измерения давлений 3, преобразующей давление в цифровой код,
выдаваемый в электронную систему управления и в бортовую систему контроля
двигателя.
На летающей лаборатории давление масла в каналах измерения тяги дополнительно воспринимается соответствующими датчиками давления 19, которые преобразовывают давление в электрические сигналы, выдаваемые в соответствующие индикаторы (указатели).
Заключение
В данном курсовом проекте был спроектирован редуктор , выполненный по схеме дифференциального разомкнутого механизма.
Были проведены расчеты:
- планетарной ступени с проверкой на:
контактную выносливость;
изгибную выносливость;
- валов соосных винтов винта с проверкой на:
статическую прочность;
выносливость;
- осей сателлитов планетарной ступени;
- эвольвентных шлицев с проверкой на смятие.
Для зубчатого механизма были подобраны оптимальные коэффициенты смещения по контактной прочности, что позволило снизить расчетные контактные напряжения на 11,73%.
Были подобраны стандартные подшипники с последующей проверкой по динамической грузоподъемности; проверены на прочность нагруженные детали редуктора: болты с помощью которых винт крепится к переднему фланцу вала.
Были подобраны материалы для всех деталей редуктора.
Дано техническое описание редуктора, входящего в него механизма измерителя тяги, принцип его действия.
В проект включены также рабочие чертежи двух деталей: шестерни и рессоры.
Список использованной литературы
1. Расчет и проектирование зубчатых передач. Учебное пособие к курсовому проектированию по деталям машин, Харьков, ХАИ – 1980, 113с.
2. Детали машин, М.М.Иванов, М. – Высшая школа, 1964г., 448с.
3. Я.Я.Перель, Подшипники качения. Справочник, М. – Машиностроение, 1983, 543с.
4. Справочник материалов, Киев – Высшая школа, 1986, 638с.
5. В.И.Анурьев, Справочник конструктора – машиностроения, в 3-х томах, Т.1,2,3 ; М. – Машиностроение,1979.